دانلود با لینک مستقیم و پر سرعت .

مقدمه
امروزه در دنیایی که کامپیوتر در ابعاد مختلف زندگی انسان باری را به دوش می کشد ، و ابؤاری برای سرعت ودقت کار ها محسوب می شود، همة ما می دانیم که رباتها یکی از پدیده های حیرت برانگیزخلق شده توسط انسان است و انسانها با در هم آمیختن علوم کامپیوتر ومکانیک وریاضی و...شگفتی های غیر قابل انکاری پدید آوردند .
هم اکنون در سال 2001 میلادی استفاده از رباتها در کشور های صنعتی امری مرسوم شده و بکار گیری آنها در خطوط صنعتی، اکتشافات فضایی، انجام کارهای پر خطر برای انسان، خانه ىاری وسرگرمی بوضوح دیده می شود .بطور مثال در کشور ژاپن بیش از سه ونیم میلیون ودر کشور ایالات متحده آمریکا بیش ازیک میلیون و هشتصد هزارربات در حال کار وجود دارد .این در حالی است که این معقولة مطالعاتی در کشور های توسعه نیافته یا در حال توسعه هنوز مورد توجه واقع نیست و ِا بطور شایسته به آن پرداخته نشده و عقب ماندگی زیادی در این مورد وموارد مشابه حس می گردد.بطوریکه منابع اطلاعاتی این صنعت در کشور ما بسیار محدود است، و معمولاًَ دنانده شرکت یا سازمانی در این مورد گامی هم برداشته باشد، از انتشار ودر اختیار گذاشتن آن برای استفادة دیگران به شدت خودداری می ورزد بابیم آنکه منافع مالی سازمان مورد تهدید واقع شود .
پایان نامه ای که هم اکنون پیش روی شماست حاصل تلاش اینجانب برای بررسی مقدمات علم رباتیک می باشد .هدف این پژوهش مطالعة موتورهای پله ایtepping Motor) ( ودرگاه موازی کامپیوتر( Parallel Port ) ومیکروکنترلرها(AVR) می باشد
در تهیة این پایان نامه سعی شده تا به موضوعات مورد بررسی بطور جامع و بصورت کاربردی پرداخته شود و از منابع اطلاعاتی معتبر استفاده شود .امید است این مجموعه بتواند در جهت آشنایی و راهنمایی دوستان دیگر که گام های بلند تر دیگری در این زمینه بر خواهند داشت، مفید واقع شود.
فصل اول:
پورت موازی این خاصیت را داشت که در هر لحظه هشت بیت داده را منتقل کند. این درحالیست که پورت سریال فقط می توانست یک بیت داده را در هر لحظه منتقل کند. همراه با رشد تکنولوژی، نیاز به اتصالات خروجی قویتر و بزرگتر افزایش یافت، لذا پورت موازی با این هدف که شما می توانستید وسایل جنبی با بازده بالاتری را به آن متصل کنید، بوجود آمد. این وسایل جنبی هم اکنون شامل محدودة وسیعی از پرینترهای اشتراکی، دیسک درایوهای پرتابل و Tape Backup گرفته تا آداپتورهای شبکه های محلی ( LAN ) و CD-ROM Player ها می شود .
مشکلاتی که توسعه دهندگان و خریداران این وسایل جنبی با آن روبرو بوده اند، به سه دسته تقسیم می شد. اول اینکه بازده PC بصورت هیجان آوری زیاد شده بود، در حالیکه تغییری در ساختمان پورت پارالل احساس نمی شد، چون حداکثر قدرت انتقال توسط این ساختمان حدود 150 کیلو بایت بر ثانیه بود، که این واقعا نیاز به یک نرم افزار قوی و قدرتمند داشت. دوم، آنکه هیچ استانداردی برای واسط های الکتریکی وجود نداشت، که این موجب مشکلات فراوانی در ضمانت عملکرد سیستم در محدوده های مختلف می شد. و سرانجام اینکه نقص استانداردهای طراحی، استفاده از کابلهایی با طول بیش از شش پا را اجازه نمیداد.
در سال 1991 دیداری توسط سازندگان پرینتر برای شروع بحث و مناظره روی گسترش یک استاندارد جدید، برای کنترل هوشمند پرینترها از طریق شبکه برگزار شد. این سازندگان که شامل Lexmark, IBM, Texas instuments و بقیه می شد، پیمان بین المللی پرینت شبکه ای ( Network Printing Alliance ) را بوجود آوردند.
NPA مجموعه ای از پارامترهایی را توصیف می کند که وقتی بر روی پرینتر و میزبان پیاده سازی شود، کنترل کامل کاربردها (Applications) وکارها ( Jobs) را ممکن میسازد.
140 صفحه فایل ورد قابل ویرایش
فهرست مطالب
مقدمه ۱
فصل اول – درگاه موازی کامپیوتر ۲
۱-۱ تاریخچه درگاه موازی ۴
۱-۲ آشنائی با درگاه موازی ۹
۱-۳ پینها و ثباتهای پورت پارالل ۱۴
۱-۴ شرح پینهای درگاه موازی ۱۷
۱-۵ استاندارد Centronics 18
۱-۶ آدرسهای پورت موازی ۲۰
۱-۷ ثبات های نرم افزار در پورت پارالل استاندارد ۲۳
۱-۸ پورتهای دو طرفه (Bi-Directional) 25
۱-۹ استفاده از پورت پارالل در ورود ۸ بیت ۲۹
۱-۱۰ مود چهار بیتی (Nibble Mode) 31
۱-۱۱ بکارگیری IRQ پورت پارالل ۳۲
۱-۱۲ مودهای پارالل پورت در BIOS 33
فصل دوم موتورهای پله ای و مدارات کنترل آنها ۳۶
۲-۱ آشنایی با موتور پله ای ۳۷
۲-۲ ساختمان داخلی موتور پله ای ۴۰
۲-۳ طبقه بندی موتورهای پله ای ۴۲
الف- موتورهای پله ای نوع آهنربای دائمی ۴۲
ب- موتورهای پله ای نوع رلوکتانس متغییر ۴۴
ج- موتورهای هیبرید ۴۷
۲-۴ انواع موتورهای پله ای و چگونگی عملکرد آنها ۴۷
– موتورهای با مقاومت مغناطیسی متغییر ۴۸
– موتورهای تک قطبی ۵۱
– موتورهای دو قطبی ۵۲
– موتورهای چند فاز ۵۴
۲-۵ ترتیب فازهای موتور پله ای ۵۴
۲-۶ پارامترها و اصطلاحات موتور پله ای ۵۹
۲-۷ مدارات کنترل موتور پله ای ۶۸
– موتورهای رلوکتانس متغییر ۶۸
– موتورهای مغناطیس دائم تک قطبی و هیبرید ۷۱
– راه اندازهای تک قطبی و رلوکتانس متغییر کاربردی ۷۳
– موتورهای دوقطبی و H-bridge 76
– مدارات راه انداز دوقطبی کاربردی ۷۹
۲-۸ نرم افزار کنترل موتور پله ای ۸۴
۲-۹ آشنائی با چند موتور پله ای قابل دسترس در بازار ۸۸
۲-۹-۱ شناسایی بعضی از موتورهای پله ای
از روی تعداد و رنگ سیم ۹۳
۲-۱۰ بررسی بعضی از مدارات کنترل و درایور موتورهای پله ای ۹۵
فصل سوم – سخت افزار و نرم افزار پروژه ۱۰۱
۳ -۱ معرفی میکرو کنترلر AVR 105
۳-۲ خصوصیات ATMEGA32 106
۳-۳ معرفی مختصر کامپایلر BASCOM 107
۳-۴ استفاده از ATMEGA32 به عنوان درایور یک
STEPPER MOTOR 108
۳-۵استفاده از میکرو کنترلر ATMEGA32 به عنوان
درایور چهار محور ربات ۱۱۰
۳-۶ استفاده از کامپایلر C++ در برنامه نویسی پورت پارالل ۱۱۲
۳-۷ برنامه کنترل ربات نوشته شده تحت کامپایلر C++ 115
ضمیمه الف ۱۲۱
ضمیمه ب ۱۲۶
ضمیمه ج ۱۳۳
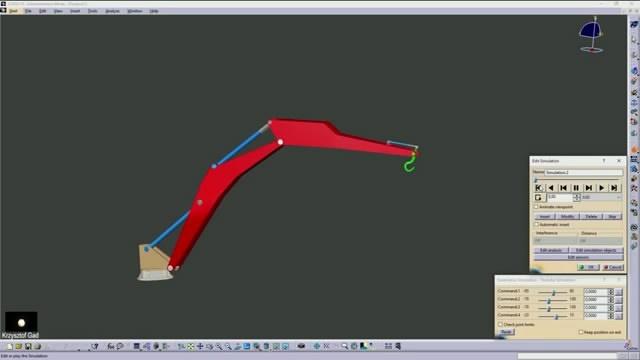
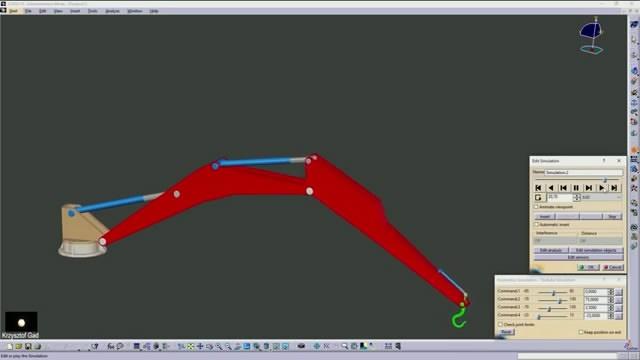
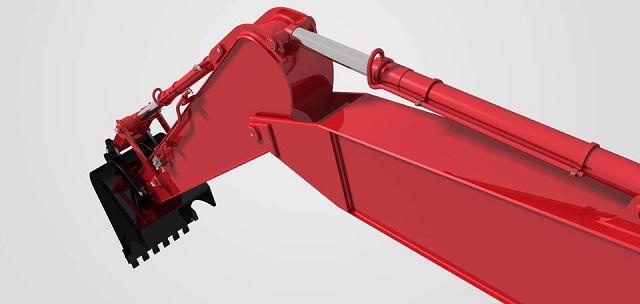
 در محیط DMU Kinematic Simulator نرم افزار CATIA")